Visibility-Aware Mobile Grasping in Dynamic Environments
In Submission
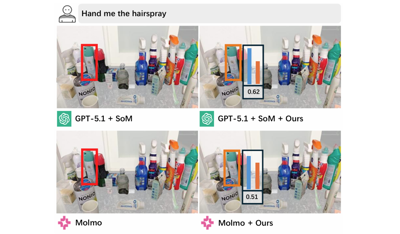
Uncertainty Estimation for Visual Grounding in the Open World
In Submission

Hypothesis-driven Model Expansion under Uncertainty for Open-World Robot Planning
In Submission